Описание
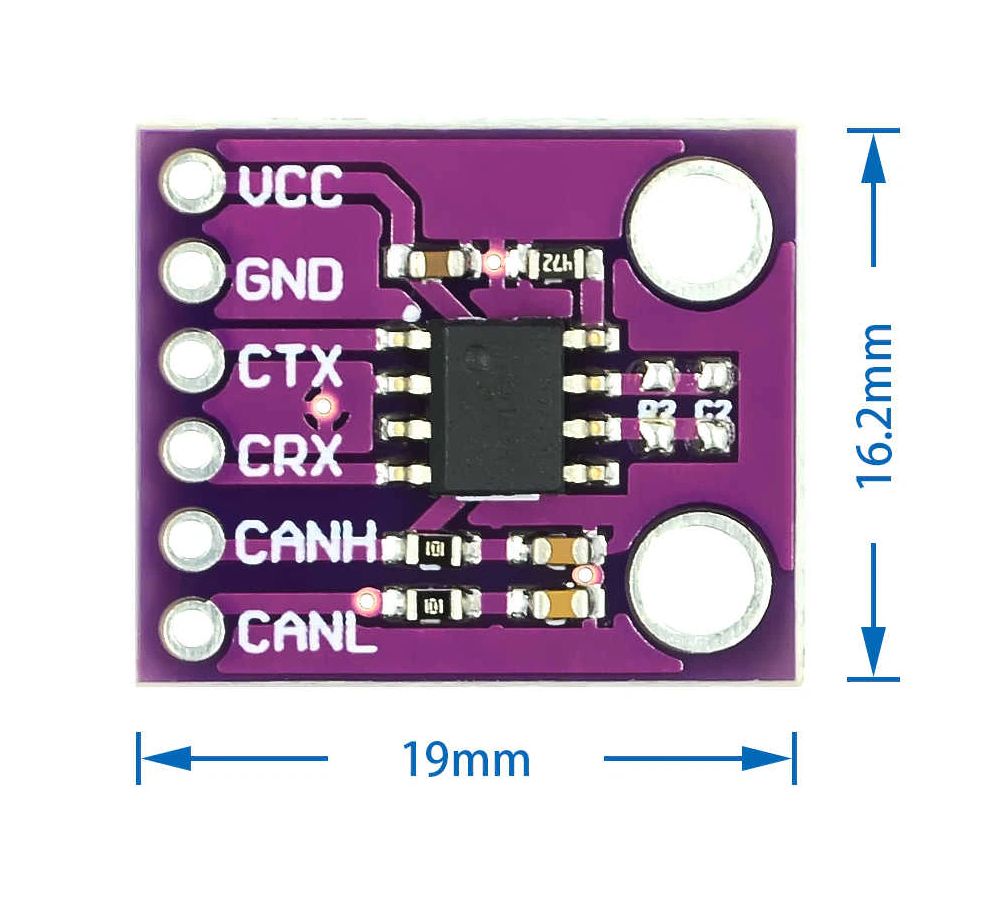
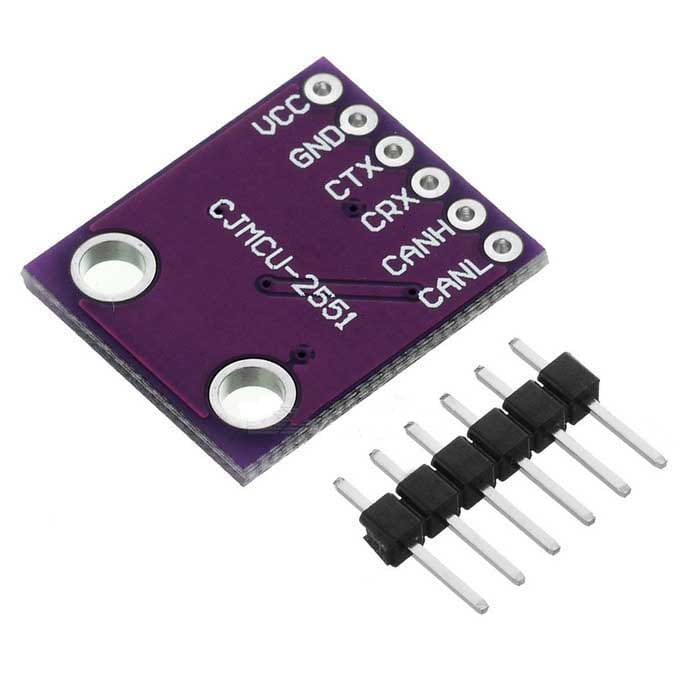
Модуль MCP2551 высокоскоростного интерфейса шины контроллера CAN protocol
MCP2551 — приёмопередатчик CAN
Микросхема MCP2551 — приёмопередатчик CAN, который реализует физический уровень, описанный в спецификации ISO-11898-2. Он поддерживает скорость передачи данных до 1 Мбит/с и подходит для систем с напряжениями питания 12 В и 24 В. MCP2551 обеспечивает защиту от короткого замыкания до ±40 В и защиту от кратковременных напряжений до ±250 В.
Дополнительно, будучи совместим с ISO-11898-2, MCP2551 обеспечивает сброс при включении питания (power-on reset — POR) и защиту от кратковременного падения напряжения (brown-out protection), а также обнаружение постоянного доминанта (permanent dominant detection), чтобы гарантировать, что обесточенный или неисправный узел не будет мешать работе шины. Устройство реализует настраиваемую наклонную регулировку усиления (slope control) на выводах шины для уменьшения излучения радиопомех (RFI). На Рис.1 представлена блок-схема MCP2551.

Рис. 1. Блок-схема MCP2551
Основная работа MCP2551
Передача:
Контроллер протокола CAN выдаёт поток последовательных данных на логический вход TXD MCP2551. Соответствующее рецессивное или доминантное состояние выдаётся на выводы CANH и CANL.
Приём:
MCP2551 принимает доминантное или рецессивное состояния на те же выводы CANH и CANL, с которых осуществляется передача. Эти состояния выдаются в виде соответствующих логических уровней на вывод RXD, чтобы контроллер протокола CAN принял кадр CAN.
Рецессивное состояние:
Логическая «1» на входе TXD отключает драйверы от вводов CANH и CANL, и выводы «подтягиваются» к номиналу 2.5 В через резисторы смещения.
Доминантное состояние:
Логический «0» на входе TXD включает драйверы выводов CANH и CANL. На CANH подаётся на ~1 В больше, чем номинал рецессивного состояния 2.5 В, таким образом увеличивая напряжение до ~3.5 В. На CANL подаётся на ~1 В меньше, чем номинал рецессивного состояния, таким образом уменьшая напряжение до ~1.5 В.
Режимы работы
Существует три режима работы, которые управляются извне через вывод RS:
1. Высокоскоростной режим.
2. Режим наклонной регулировки усиления.
3. Режим ожидания (Standby)
Высокоскоростной режим:
Высокоскоростной режим выбирается подключением вывода RS к VSS. В этом режиме выходные драйверы имеют быстрое время нарастания и спада, что обеспечивает наивысшие скорости передачи до 1 Мбита/с и/или максимальную длину шины, а также обеспечивая минимальные циклические задержки приёмопередатчика.
Режим наклонной регулировки усиления:
Если требуется уменьшить излучаемые драйвером электромагнитные помехи, MCP2551 можно установить в режим наклонной регулировки усиления подключением резистора (REXT) от вывода RS на общий минус. В режиме наклонной регулировки усиления скорость нарастания выходного напряжения на одном проводе (на CANH или CANL) в основном пропорциональна выходному току на выводе RS. Ток должен быть в диапазоне от 10 мкА < IRS < 200 мкА, который соответствует напряжению на выводе в диапазоне 0.4·VDD < VRS < 0.6·VDD соответственно (или обычно 0.5·VDD).
Уменьшение скорости нарастания выходного напряжения приводит к уменьшению скорости передачи данных CAN при заданной длине шины, либо к сокращению длины шины при заданной скорости передачи данных.
Режим ожидания:
Режим ожидания (или спящий режим (sleep)) устанавливается подключением вывода RS к VDD. В спящем режиме передатчик отключен, а приёмник работает в режиме пониженного энергопотребления. Принимающий вывод (RXD) по-прежнему функционирует, но на более низкой скорости.
Режим ожидания можно использовать для установки устройства в режим низкого энергопотребления и выключения передатчика в случае, если контроллер CAN неисправен и выдаёт на шину непредсказуемые данные.


Отзывы
Отзывов пока нет.